Explorateur
Le lien du projet GitHub : https://github.com/AlexisBallan/explorateur
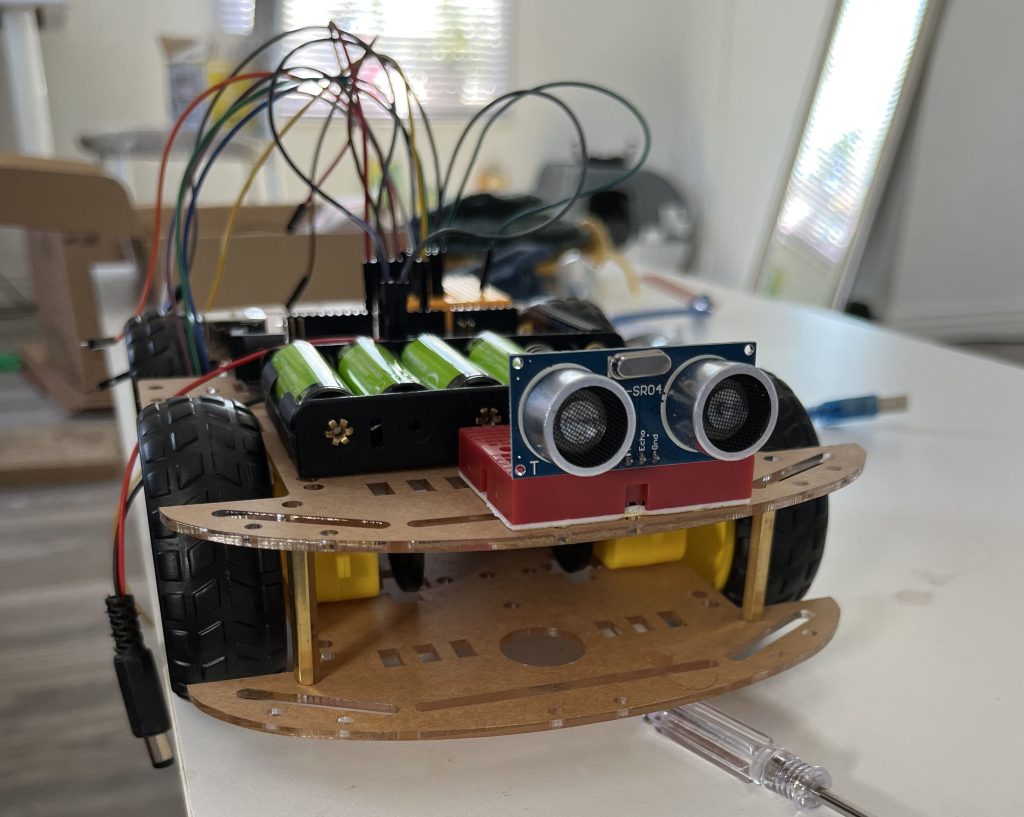
Description
L’explorateur est un projet visant à créer un robot équipé de 4 roues et d’un capteur à ultrason afin qu’il sache s’il y a des obstacles devant lui. Il est contrôlable à l’aide d’une télécommande (j’ai utilisé celle de ma télévision) et il reconnait les fréquences grâce à son capteur infrarouge. Il est équipé de 4 micros-moteurs ainsi que d’un L298N Driver (un objet qui permet de contrôler les moteurs, de savoir lesquelles activées selon l’action souhaitée).
Fonctionnement
Voici les vidéos du fonctionnement d’Explorateur :
- Version 1 :
- Version 2 :
Montage
Voici les différentes étapes du montage :
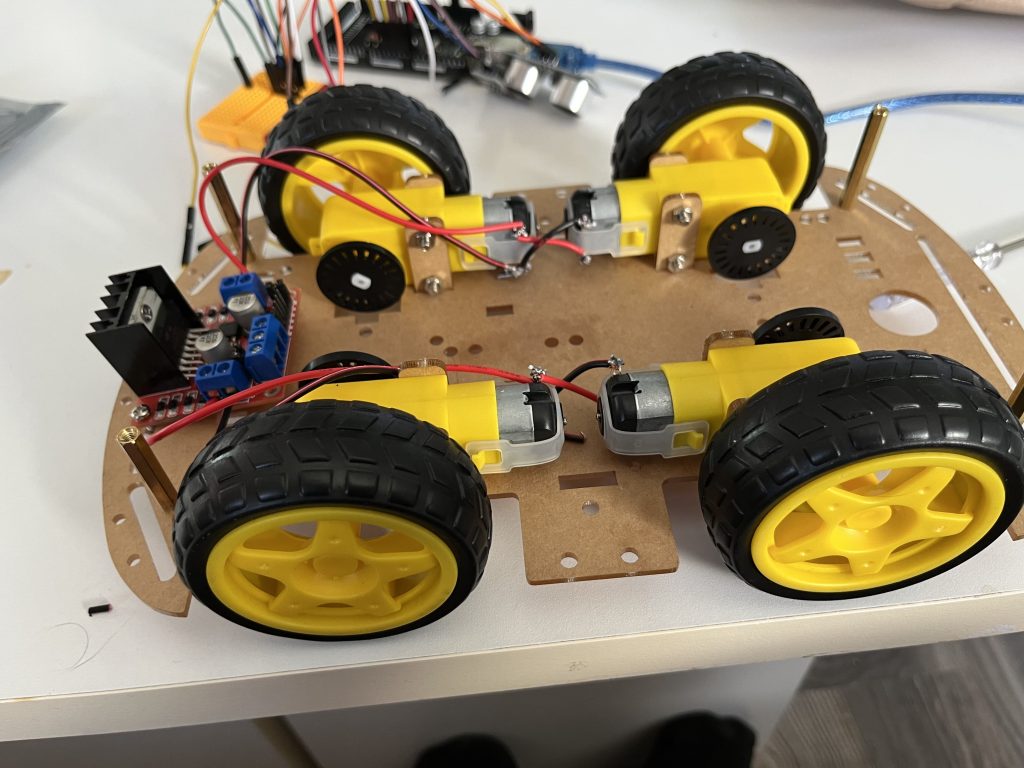
- Montage des moteurs et des roues
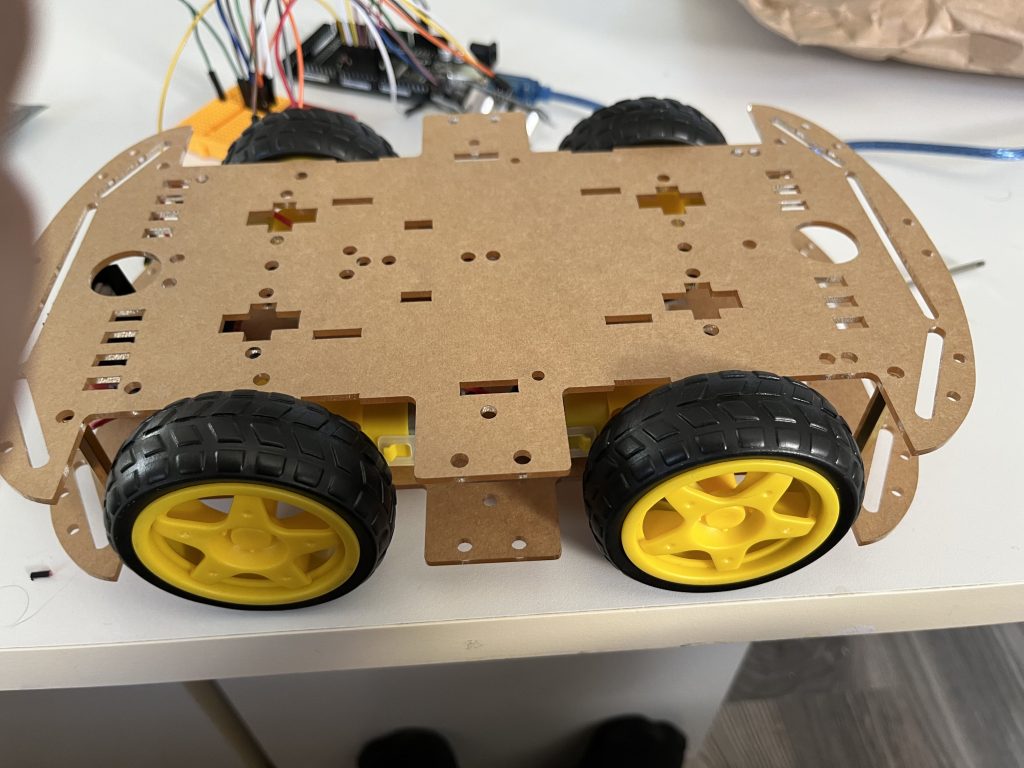
- Montage de l’armature
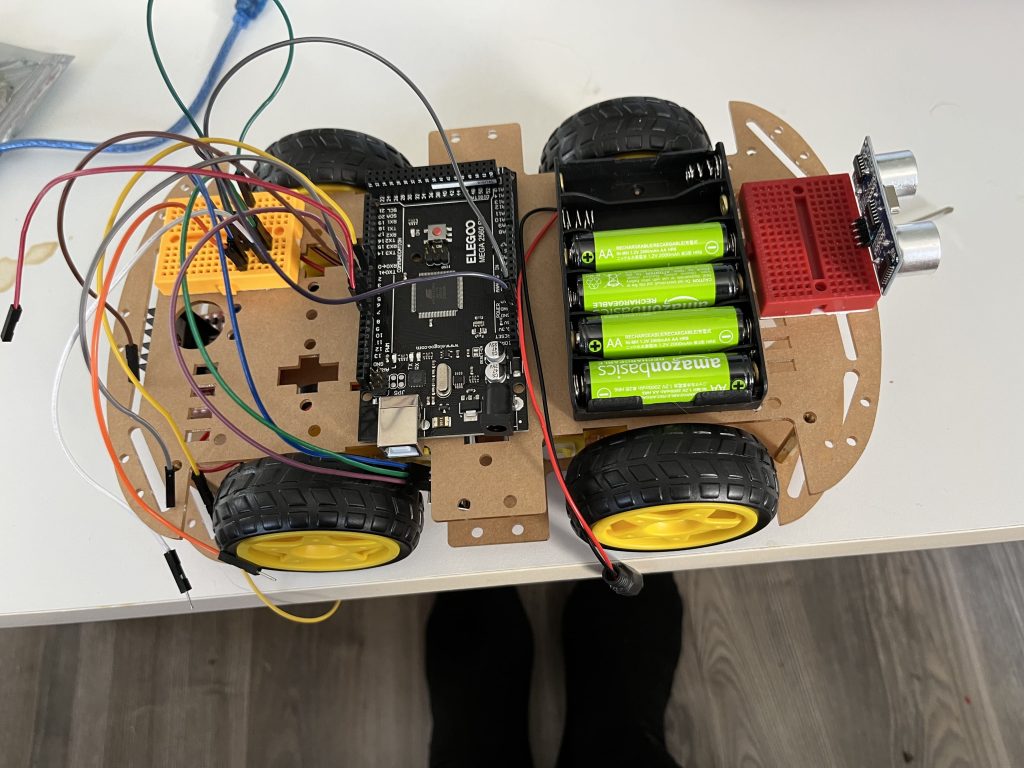
- Assemblement de l’Arduino et câblage des différents éléments (vers le moteur, le capteur infrarouge et le capteur à ultrason ainsi que vers la batterie).
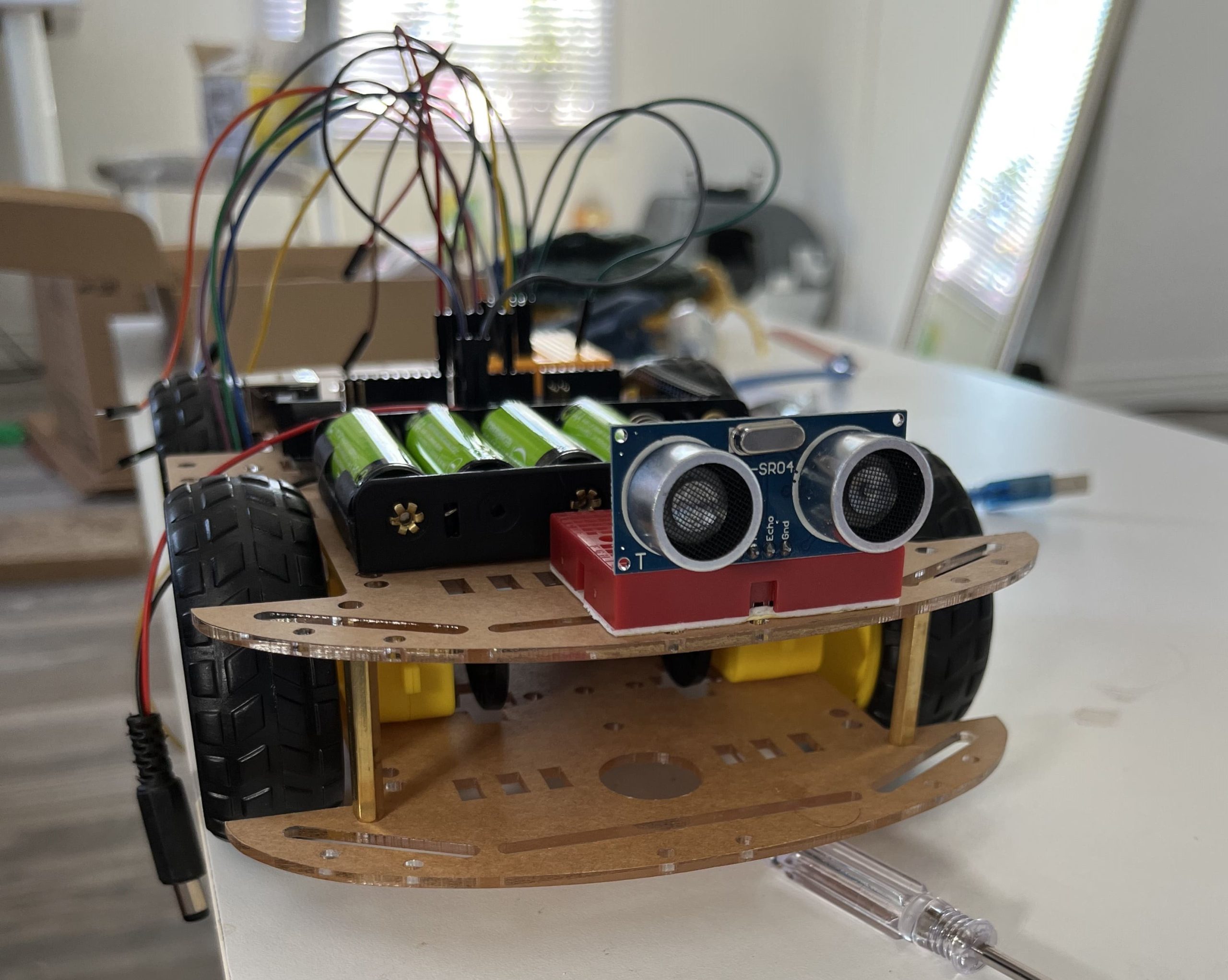
- Assemblage fini !
Détails techniques
Je vais faire un résumé des points forts et des points faibles du robot :
Points forts :
- Il est contrôlable grâce à n’importe quel télécommande.
- Ses moteurs lui permettent de monter de toutes petites pentes.
- Son mode autonome lui permet d’éviter de foncer dans des objets.
- Il a une bonne autonomie (environ 3 heures).
Points faibles :
- Il se repère avec un capteur à ultrason, si il y a un objet en mousse (par exemple une éponge), cela va absorber le son et il ne va pas détecter l’objet devant lui.
- On ne peut pas gérer sa vitesse, il va toujours à la même vitesse.
- Il ne détecte pas le vide, il peut donc tomber d’une table ou dans les escaliers.